企业免费推广平台

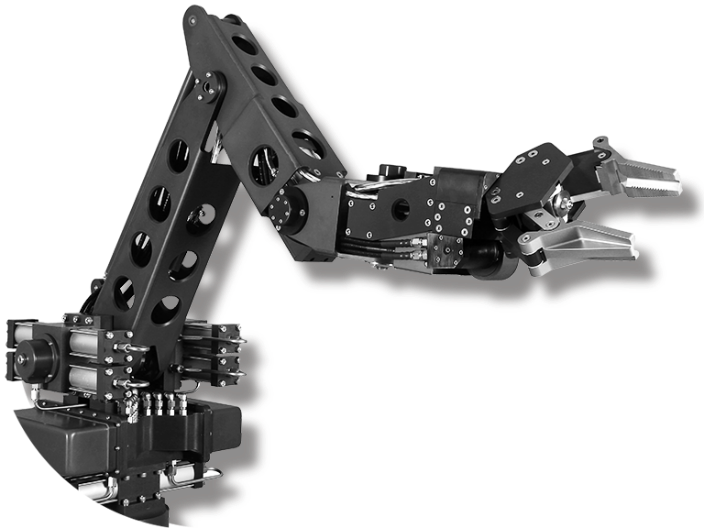
浙江凯富博科科技有限公司液压机械臂|主从控制机器人|6 1轴机械臂|带电作业机器人
183****0123
随着智能制造技术的不断发展,机器人作为新一代制造工具已成为各行业生产的重要力量。主从控制机器人是目前应用较为范围广的一种机器人,它采用了分布式控制系统,通过主控制器和多个从控制器实现协同工作。主控制器可以集成任务规划、路径规划等高级控制技术,从而可以对系统进行范围大管理和优化;从控制器负责机器人的运动控制和传感器数据的采集,保证系统的稳定性和可靠性。在生产流程中,主从控制机器人可以根据设定的程序自动执行搬运、装配、检测等任务,极大地提高了生产效率和产品质量。例如在汽车制造行业中,主从控制机器人可以应用于车身焊接、喷涂、总装等环节,实现自动化生产,加快生产速度、提高制造精度,并降低了生产成本。除了制造业外,主从控制机器人还可以应用于物流仓储、医疗卫生等领域,江苏应急救援主从控制机器人制作。例如在物流仓储中,江苏应急救援主从控制机器人制作,江苏应急救援主从控制机器人制作,通过使用主从控制机器人,可以实现货物的自动分拣、存储和运输;在医疗卫生领域,可以使用主从控制机器人进行手术、患者监测等工作,提高医疗质量和效率。综合来看,主从控制机器人的应用范围范围广,可以有效提高生产效率和产品质量,降低了成本和风险,并为工业自动化发展带来了新的机遇。主控制器通过网络或总线与从控制器进行通信,从而实现对从控制器的远程监控和控制。江苏应急救援主从控制机器人制作
主从控制机器人运动控制要求主从控制机器人能够按照预定的控制指令和控制方式执行相应运动。常用的运动控制方式有三种:笛卡尔空间控制方式、关节空间控制方式、逆雅可比控制方式。在笛卡尔空间控制方式中,需要建立主从手笛卡尔空间坐标系之间的对应关系,将主手的运动信息传递至从手的笛卡尔空间中,根据正、逆运动学求解出关节的位置信息。该种控制方式适用于主从异构模型,在实际控制中还需实时调节主手对从手的不同行程映射系数。在关节空间控制方式中,主手各关节的运行信息一一对应的传递至从手各关节,其适用于主从同构式控制模型。逆雅可比控制方式,实质是对主从控制机器人进行速度控制,根据主手末端点的速度信息经过逆雅可比矩阵求解,得到从手各关节的速度信息。该种控制方式等效于笛卡尔空间控制方式,在某些层面上,两者可以相互结合,使得控制更加精确。浙江主从控制机器人制作主从控制机器人可应用于装配,维修,拆卸,喷涂等工业场景,为空间狭小或危险环境提供解决方案。

浙江凯富博科科技有限公司专注研发的主从控制操作机器人,除了具有同构主从机器人的优点之外,一方面能够使主手完全适应操作者的需要,另一方面还能够使从手更好的完成操作任务,其技术难点往往在于如何实现其主从控制。在计算机飞速发展,这种主从机器人的控制问题己经可以实现,因此,对于主从操作机器人来说,结构上的异构,而实际的操作控制可以达到同构效果得主从机器人是其研究与开发的方向。在硬件方面,在满足作业要求的前提下,主从结构框架应尽可能对应,自由度完全相同,运动方式基本对应;在控制系统方面,通过运动学方程实现运动的匹配映射,终软硬件结合,实现异构结构达到同构的实际操作控制效果。
主从控制机器人的优势协作性强:主从控制机器人能够根据不同的任务需要协作完成复杂的操作流程,提高工作效率。灵活性高:主从控制机器人系统可以根据任务需要随时调整机器人的数量和类型,适应不同的工业和商业领域的需求。自动化程度高:主从控制机器人系统能够通过自主学习和感知技术实现自动化操作,降低人工干预和错误率,提高生产效率和质量。安全性高:主从控制机器人所配备的安全区域保护,防撞保护等安全设备,使机器人的操作更加可靠和安全。易于控制:主从控制机器人系统采用的通信、控制技术能够实现对机器人的实时控制和监控,运行过程中可随时修改任务分配。未来,主从控制机器人将更加智能化、精细化和灵活化。

感知系统主从控制机器人的感知系统能够对环境进行感知,获得环境中的信息,为机器人的运动和任务执行提供有关的信息。机器人通过传感器获取系统信息,包括但不限于距离、位置、温度、压力等。感知系统应具备以下特点:(1)多样性:主从控制机器人的感知系统需要支持多种传感器,如视觉感知、距离感知、声音感知等多种传感器。(2)异构性:由于机器人系统中主从机器人的类型和数量不同,因此,感知系统需要支持异构传感器的集成。(3)准确性:感知系统需要提供高精度的数据,以支持机器人的工作。协作系统主从控制机器人的协作系统是机器人协同完成复杂任务的内核。协作系统需要考虑机器人之间的合作、通信和工作流程等。协作系统应具备以下特点:(1)分布式:协作系统需要支持分布式信息交换和处理。(2)实时性:协作系统需要实时掌握各个机器人的位置、状态等信息,以保证协作实现。(3)适应性:协作系统需要考虑多种协作方式,以适应机器人在不同场合下的操作需要。主从控制机器人中,主控制机器人担任任务管理者和协调者角色,负责任务分配、路径规划、传感器数据处理。江苏主从控制机器人
什么是主从控制机器人?江苏应急救援主从控制机器人制作
通过机器人替代、软件信息化、柔性化生产等方式,生产型企业可实现上下游信息透明、协作设计与生产,提升了生产服务的质量与效率。液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人产业的再制造已经成为其产业链中的重要一环。它为客户提供降低产品全生命周期成本的极优方式,也支持了我国提倡的发展绿色循环经济的号召,成为工程机械行业未来发展的重要方向。机械企业常常利用虚拟制造技术来提升反应能力,而虚拟制造技术也是机械制造领域中重点的技术。对现代化有限责任公司企业来说,具备敏捷的反应能力是未来努力的方向。随着社会的发展,创新、协调、绿色、开放、共享的五大发展理念对机械及行业设备行业提出了更高的要求,研发技术含量高、附加价值高、智能化程度高而碳排放量少的新型设备。江苏应急救援主从控制机器人制作
浙江凯富博科科技有限公司一直专注于从事机器人、飞行器、机械设备、机电一体化、计算机、物联网、通信、智能化科技领域内的技术开发、技术咨询、技术服务、技术转让;工业机器人、机械手的制造、加工(除废塑料、危险品及有污染的工艺)、销售;液压的设备及配件、消防设备、仪表仪器、电气设备、自动化设备及配件、通用机械设备及配件、金属材料、五金制品的销售;货物及技术进出口(国家禁止或涉及行政审批的货物和技术进出口除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动),是一家机械及行业设备的企业,拥有自己独立的技术体系。一批专业的技术团队,是实现企业战略目标的基础,是企业持续发展的动力。浙江凯富博科科技有限公司主营业务涵盖液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人,坚持“质量保证、良好服务、顾客满意”的质量方针,赢得广大客户的支持和信赖。公司深耕液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人,正积蓄着更大的能量,向更广阔的空间、更宽泛的领域拓展。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
浙江凯富博科科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

