企业免费推广平台

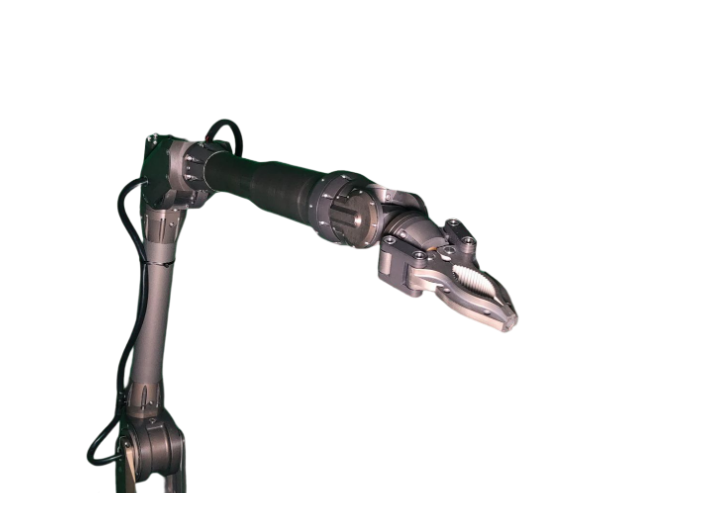
浙江凯富博科科技有限公司液压机械臂|主从控制机器人|6 1轴机械臂|带电作业机器人
183****0123
特种作业机器人是一种设计和制造用于完成特殊工业任务的机器人系统,浙江特种作业机器人,包括但不限于焊接、喷涂、装配、清洗等领域。这种机器人系统通常具有高度灵活性和自主性,可以通过传感器、计算机视觉、控制系统等技术实现自主感知和决策,能够高效、稳定地完成各种复杂的工业操作。相对传统的人力劳动或机械设备操作,特种作业机器人不仅提高了生产效率和产品质量,还极大地减少了劳动力成本和安全隐患,并且在适应性和精度方面优于传统方法。目前,特种作业机器人已经在诸如汽车、航空、制药、建筑和矿业等领域得到广泛应用,浙江特种作业机器人,浙江特种作业机器人,并且随着智能化制造的推广,特种作业机器人未来将会有更广阔的发展前景。特种作业机器人在恶劣环境下也可以稳定运行,并保证工作质量。浙江特种作业机器人
特种作业机器人是一类用于特定工业生产环境和工艺需求的机器人系统,包括焊接机器人、喷涂机器人、装配机器人、清洗机器人等。这些机器人采用传感器、计算机视觉、控制系统等技术实现自主感知和决策,能够高效、稳定地完成一系列工业流程。相比传统的人力作业和机械设备操作,特种作业机器人不仅能够提升生产效率和产品质量,还能够减少劳动力成本和安全隐患。特种作业机器人广泛应用于汽车制造、电子信息、航空航天、新能源等领域,为工业制造提供了智能化、柔性化的生产模式。未来,随着智能制造技术和工业4.0的不断推广和发展,特种作业机器人将会更加智能化、精细化、自适应化,为各行业带来更多的生产优化和创新应用。浙江特种作业机器人特种作业机器人需要根据具体作业场景进行设计和制造,包括耐高温、耐腐蚀等特殊要求。

特种作业机器人是指专门为一些特殊行业和场景设计的机器人,例如清洁机器人、物流配送机器人、医疗机器人等。这些机器人具备自主导航、视觉识别、人机交互等先进技术,在特定的场景中能够取代人力完成重复性、危险或强度高度的工作,提高工作效率和安全性,降低人力成本。特种作业机器人的发展受到了有关部门和社会的范围广关注和支持,逐渐成为推动智能制造和服务业转型升级的重要力量。在未来,特种作业机器人将在不同领域得到广泛应用,如家庭服务、医疗护理、工业制造、智慧物流等领域,并将通过技术创新和产业升级,为经济发展和社会进步做出更大的贡献。
特种作业机器人是一种专为特定工业制造和生产环境而开发的机器人,可用于焊接、喷涂、清洗、装配等特定工艺的自动化处理。与传统的机械设备或人力操作相比,特种作业机器人能够提高生产效率和产品质量,减少劳动力成本和安全隐患。特种作业机器人通常配备有高精度的传感器、计算机视觉和控制系统等先进技术,可以在复杂的生产环境下完成各种工业任务。在未来,随着智能制造和工业智能化技术的不断发展,特种作业机器人将继续成为工业自动化和智能制造的重要推动力量,助力各行业实现生产效率和质量的提升。特种作业机器人可以根据工作需要进行多项协同作业,提高工作效率。
特种作业机器人是一种应用于特定行业或特定工艺需求的机器人系统,包括焊接机器人、喷涂机器人、装配机器人、清洗机器人等。它们通过传感器、计算机视觉、控制系统等技术实现自主感知和决策,能够高效、稳定地完成一系列工业流程。与传统的人力操作相比,特种作业机器人不仅能够提高生产效率和产品质量,还能够减少劳动力成本和安全隐患。在未来,随着智能制造的推广和应用,特种作业机器人也将逐步走向工业4.0时代,成为推动工业智能化发展的重要力量。同时,随着各行业对生产效率和产品品质的要求不断提高,特种作业机器人市场需求量也将逐年增加,为机器人技术创新和应用提供更广阔的发展空间。特种作业机器人可应用于远程设备操控,可以完成遥感、制造等复杂工作。浙江6+1 轴特种作业机器人生产厂家
特种作业机器人需要根据不同的作业场所和环境进行设计和制造,以适应不同的需求。浙江特种作业机器人
逆雅可比控制是一种基于机器人末端执行器位置和姿态控制的方法。通过逆向计算雅可比矩阵的过程,可以得到关节角度的控制方案,从而实现对机器人末端执行器位置和姿态的控制。逆雅可比控制方法适合用于非线性系统和高自由度系统,具有良好的抗干扰性和稳定性。具体来说,逆雅可比控制方法的步骤如下:计算雅可比矩阵:首先需要计算出机器人末端执行器位置和姿态的雅可比矩阵,该矩阵描述了机器人各个关节角度与机器人末端执行器位置和姿态之间的关系。计算逆雅可比矩阵:然后,需要计算出雅可比矩阵的逆,即逆雅可比矩阵。逆雅可比矩阵能够将末端执行器位置和姿态的变化转化为关节角度的变化,因此可以用于机器人的控制。计算关节角度:根据末端执行器位置和姿态的期望值,可以通过逆雅可比矩阵计算出相应的关节角度控制量。这些控制量可以通过PID等控制器进行实时调整,从而实现对机器人末端执行器位置和姿态的控制。需要注意的是,逆雅可比控制方法存在奇异点问题。当机器人处于某些姿态下,存在解不***或者无法求解的情况。因此,在实际应用中需要考虑避免机器人进入奇异点,并且对于可能进入奇异点的情况,需要采用其他控制方法来进行控制。 浙江特种作业机器人
浙江凯富博科科技有限公司办公设施齐全,办公环境优越,为员工打造良好的办公环境。在凯富博科近多年发展历史,公司旗下现有品牌凯富博科,CathayBot等。公司以用心服务为重点价值,希望通过我们的专业水平和不懈努力,将从事机器人、飞行器、机械设备、机电一体化、计算机、物联网、通信、智能化科技领域内的技术开发、技术咨询、技术服务、技术转让;工业机器人、机械手的制造、加工(除废塑料、危险品及有污染的工艺)、销售;液压的设备及配件、消防设备、仪表仪器、电气设备、自动化设备及配件、通用机械设备及配件、金属材料、五金制品的销售;货物及技术进出口(国家禁止或涉及行政审批的货物和技术进出口除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动)等业务进行到底。自公司成立以来,一直秉承“以质量求生存,以信誉求发展”的经营理念,始终坚持以客户的需求和满意为重点,为客户提供良好的液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人,从而使公司不断发展壮大。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
浙江凯富博科科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

