企业免费推广平台

浙江凯富博科科技有限公司液压机械臂|主从控制机器人|6 1轴机械臂|带电作业机器人
183****0123
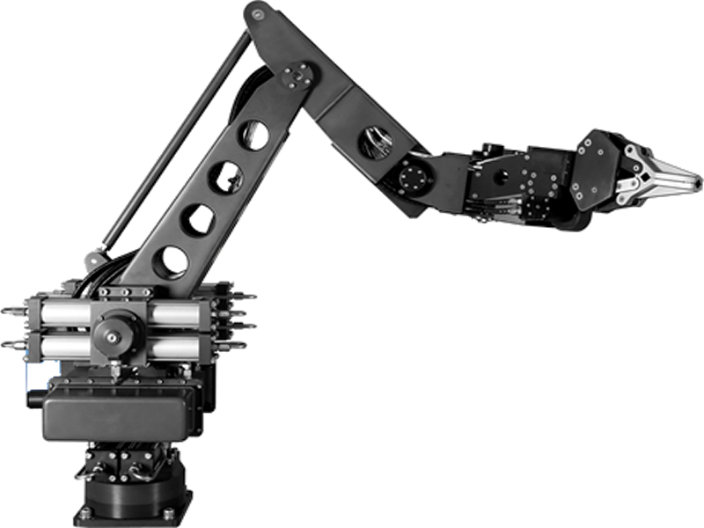
Uranus天王星液压机械臂是在一款高度集成化得产品级6+1自由度液压机械臂,采用全自主设计伺候直线油缸作为动力单元,采用高度集成阀块设计,整体无液压管路外露,上海应急救援主从控制机器人制作。本体重量控制在82公斤以内,工作半径可达2米,最大负载大于227公斤,满足大范围高负载工作业务场景。两款主从控制同构助手MiniMaster和StandardMaster,上海应急救援主从控制机器人制作。用户可根据不同的应用场景选择不同类型的主手,与液压机械臂6自由度同构设计,操作更直观,临场感更好,双手可同时操作双臂进行协同作业,完成更为复杂作业任务;在操作空间允许情况可用StandardMaster进行单手灵活操作。同时配备主从控制软件中/英文操作系统,采用工业级高亮触摸屏,上海应急救援主从控制机器人制作,在室外强光下正常使用。浙江凯富博科科技有限公司是国际先进的主从控制特种作业机器人系统制造商以及解决方案提供商。上海应急救援主从控制机器人制作

机器人运动控制要求机器人能够按照预定的控制指令和控制方式执行相应运动。常用的运动控制方式有三种:笛卡尔空间控制方式、关节空间控制方式、逆雅可比控制方式。在笛卡尔空间控制方式中,需要建立主从手笛卡尔空间坐标系之间的对应关系,将主手的运动信息传递至从手的笛卡尔空间中,根据正、逆运动学求解出关节的位置信息。该种控制方式适用于主从异构模型,在实际控制中还需实时调节主手对从手的不同行程映射系数。在关节空间控制方式中,主手各关节的运行信息一一对应的传递至从手各关节,其适用于主从同构式控制模型。逆雅可比控制方式,实质是对机器人进行速度控制,根据主手末端点的速度信息经过逆雅可比矩阵求解,得到从手各关节的速度信息。该种控制方式等效于笛卡尔空间控制方式,在某些层面上,两者可以相互结合,使得控制更加精确。浙江电力工业主从控制机器人制作主从控制机器人的适用行业有哪些?
迄今,绝大多数主从操作机器人的主手和从手的结构是相同的或者近似相同的,在医疗机器人领域也是如此。例如,美国NASA实验室的眼科手术机器人,日本东京大学研制的遥操作显微血管缝合机器人,均采用主从同构的结构形式。这种结构的优点是主从运动直观性强,运动控制简单,操作简单;但是,主从同构机器人的设计要同时兼顾主手和从手双方的特点,不能充分满足各自的需要。然而,在系统中引入计算机之后,主从同构机器人的这种不能满足各自需要的束缚就可以摆脱了。此时,主手和从手的设计可以分别按照各自的功能和特殊的要求来考虑,设计为结构上异构,而实际的操作控制可以达到同构效果的主从形式。
凯富博科参展世界机器人展,产品一经亮相,就获得了众多行业大型企事业单位的青睐,并有意向订单。目前,凯富博科主要提供作业级特种机器人产品、**部件、整体解决方案,为在急难险重环境作业中解放人力、保障人身安全提供产品和技术支持。凯富博科自主研发的6+1轴主从控制液压机械臂-Mercury水星,采用高保真力反馈和主从控制技术,确保高精度作业动作,执行精细操作;**度和高密闭性设计,确保液压油无泄露,让机械臂能在3000米深水环境的高压、高湿等恶劣环境下,同时进行伸缩等多个动作,满足特种作业需求。主从控制机器人的应用场景有哪些?

机器人控制系统的基本功能有:1.控制机械臂末端执行器的运动位置(即控制末端执行器经过的点和移动路径);2.控制机械臂的运动姿态(即控制相邻两个活动构件的相对位置);3.控制运动速度(即控制末端执行器运动位置随时间变化的规律);4.控制运动加速度(即控制末端执行器在运动过程中的速度变化);5.控制机械臂中各动力关节的输出转矩:(即控制对操作对象施加的作用力);6.具备操作方便的人机交互功能,机器人通过记忆和再现来完成规定的任务;7.使机器人对外部环境有检测和感觉功能。工业机器人配备视觉、力觉、触觉等传感器进行测量、识别,判断作业条件的变化等。主从控制机器人的研发需要哪些条件?上海小型主从控制机器人
控制系统是机械臂的操控中心,控制驱动系统驱使执行系统按预定动作完成任务。上海应急救援主从控制机器人制作
在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂的区别就在于灵活度与耐力度。也就是机械手的大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越***,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。上海应急救援主从控制机器人制作
浙江凯富博科科技有限公司目前已成为一家集产品研发、生产、销售相结合的生产型企业。公司成立于2019-06-12,自成立以来一直秉承自我研发与技术引进相结合的科技发展战略。公司具有液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等多种产品,根据客户不同的需求,提供不同类型的产品。公司拥有一批热情敬业、经验丰富的服务团队,为客户提供服务。凯富博科,CathayBot以符合行业标准的产品质量为目标,并始终如一地坚守这一原则,正是这种高标准的自我要求,产品获得市场及消费者的高度认可。我们本着客户满意的原则为客户提供液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人产品售前服务,为客户提供周到的售后服务。价格低廉优惠,服务周到,欢迎您的来电!
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
浙江凯富博科科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

