企业免费推广平台

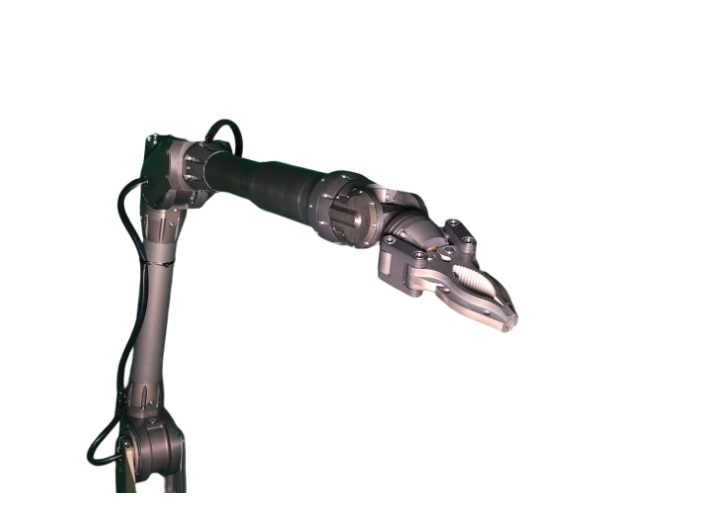
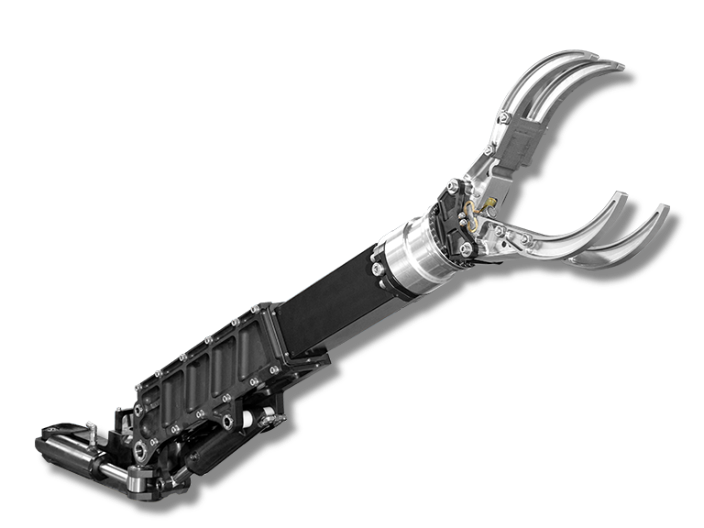
浙江凯富博科科技有限公司液压机械臂|主从控制机器人|6 1轴机械臂|带电作业机器人
183****0123
特种机器人在特种行业中的作用非常重要,以下是一些典型的行业及其对应的特种机器人应用:矿业:在矿山中,自主移动机器人可以被用于探测地质情况和勘探矿藏,人形机器人和无人机则可以被用于巡视、监测和维修。特用:在特用领域,各种类型的特种机器人都可以被用于爆破物物拆除、侦察、搜救、物资运输、战场支援等任务。特种机器人可以在高风险区域代替士兵执行任务,减少人员伤亡。消防:消防机器人可以被用于消防、搜索失踪者、救援和灭火任务。这些机器人可以进入危险区域,例如火场、建筑物塌方等难以到达的地方,以保护消防员的安全和提供更好的救援服务。医疗:医疗机器人可以被用于手术、药品管理、康复和监测等医疗任务。它们可以提高手术精度,减少内窥镜手术的创伤,同时提供更好的患者监测。建筑:建筑机器人可以被用于建筑、维修,江苏大型特种作业机器人制作、清洁和拆除任务。它们可以代替人类执行高空或危险任务,提高施工效率并减少工伤事故的发生。总之,特种机器人在特种行业中具有重要的应用价值,可以代替人类完成一些危险、高风险或高精度的任务,提高工作效率和安全性,江苏大型特种作业机器人制作,江苏大型特种作业机器人制作,在许多领域中发挥着不可或缺的作用。特种作业机器人需要由专业技术人员进行远程监控和维护,确保机器人的性能稳定和安全运行。江苏大型特种作业机器人制作
特种机器人的运动方式主要有以下几种:旋转式机器人:旋转式机器人一般采用固定基座,通过机器人自身的旋转来实现位置的改变。例如,工业机器人中的SCARA机器人和Delta机器人就是典型的旋转式机器人。平移式机器人:平移式机器人主要采用平移的方式进行行走,可以前后、左右平移或沿着指定路径运动。例如,清洁机器人、巡检机器人等均采用平移式方式进行运动。越障式机器人:越障式机器人则可以通过跳跃、攀爬、穿越等方式来越过障碍物。例如,探险和搜救机器人经常使用越障式机器人。摆臂式机器人:摆臂式机器人是一种多关节机器人,类似于人的手臂,可以在三维空间中完成曲线运动和重力平衡。例如,医疗机器人中采用的手术机器人和康复机器人等。飞行式机器人:飞行式机器人可以通过旋翼、推进器等方式进行飞行,拥有较大的灵活性和便携性。例如,无人机、特种机器人等就采用飞行式方式进行运动。总之,特种机器人的运动方式有多种多样,可以根据不同的作业场景和要求来选择相应的运动方式,从而实现高效、准确和安全的作业。 江苏核工业特种作业机器人设计特种作业机器人具备强大的承载能力和耐高温、耐腐蚀等特性,能够在恶劣条件下稳定工作。
特种作业机器人是一种能够在危险或难以到达的环境中进行操作的机器人系统,如高空、水下、化学品、核辐射等环境。特种作业机器人充分利用了现代机电一体化技术、智能控制、传感器技术和通讯技术等领域的成果,具有自主导航、避障、可编程等特点。特种作业机器人可以广泛应用于石油、天然气、电力、核电、航空、船舶、海洋、特用等领域。例如,在石油勘探开发中,特种作业机器人可以在高温、高压、有毒有害的井下环境中进行勘测和修复;在核电站中,特种作业机器人可以在高辐射环境中进行检修和清理工作;在船舶维护中,特种作业机器人可以在船底、船舱等难以到达的位置进行检查和维修。特种作业机器人的出现,不仅可以提高作业效率和质量,降低劳动强度和安全风险,还可以拓展人类无法到达的领域,为科技进步和人类文明进程做出贡献。
特种作业机器人是一种用于完成特殊作业任务的机器人设备。与普通工业机器人相比,它们在设计和制造过程中需要考虑特殊环境、场景和作业需求。例如,特种作业机器人可能需要操作在高温、低温、高压、强辐射等恶劣环境下的设备或生产线。特种作业机器人往往有丰富的功能和特点,如高载荷、高精度、多自由度、长工作时间、远距离控制等。它们的应用范围非常范围广,包括航空航天、核能、矿业、石油化工、海洋探测等领域。例如,在核电站中,特种作业机器人可以进行核污染区的清理、检测、维护等工作,使得人员免受辐射的危害。在深海勘探中,特种作业机器人可以进行海底油田钻探和开采,实现极端环境下的自主化探测和作业。未来,随着科技的不断发展和应用需求的不断增加,特种作业机器人的应用前景将会越来越广阔。同时,特种作业机器人制造商需要根据不同领域和行业的需求,不断研发和优化机器人的功能和性能,提高机器人的智能化、自主化、安全性和灵活性。特种作业机器人将会在未来的工业生产中扮演越来越重要的角色。特种作业机器人可以提高作业效率和精度,降低人为失误的风险,提高工作质量。
逆雅可比控制是一种基于机器人末端执行器位置和姿态控制的方法。通过逆向计算雅可比矩阵的过程,可以得到关节角度的控制方案,从而实现对机器人末端执行器位置和姿态的控制。逆雅可比控制方法适合用于非线性系统和高自由度系统,具有良好的抗干扰性和稳定性。具体来说,逆雅可比控制方法的步骤如下:计算雅可比矩阵:首先需要计算出机器人末端执行器位置和姿态的雅可比矩阵,该矩阵描述了机器人各个关节角度与机器人末端执行器位置和姿态之间的关系。计算逆雅可比矩阵:然后,需要计算出雅可比矩阵的逆,即逆雅可比矩阵。逆雅可比矩阵能够将末端执行器位置和姿态的变化转化为关节角度的变化,因此可以用于机器人的控制。计算关节角度:根据末端执行器位置和姿态的期望值,可以通过逆雅可比矩阵计算出相应的关节角度控制量。这些控制量可以通过PID等控制器进行实时调整,从而实现对机器人末端执行器位置和姿态的控制。需要注意的是,逆雅可比控制方法存在奇异点问题。当机器人处于某些姿态下,存在解不***或者无法求解的情况。因此,在实际应用中需要考虑避免机器人进入奇异点,并且对于可能进入奇异点的情况,需要采用其他控制方法来进行控制。 特种机器人在农业领域的应用可以进行智能化灌溉和精细施肥,为农业生产带来新的发展模式和进程。上海智能特种作业机器人联系方式
特种作业机器人的运维与维护也需要专业的团队和流程,以确保机器人的长期稳定运行。江苏大型特种作业机器人制作
特种作业机器人指的是针对某些特定场景和工作需求而设计的机器人系统。这些机器人通常具有一定的自主性和灵活性,能够在环境复杂或危险的情况下完成一系列动作和操作任务。特种作业机器人的应用范围非常范围广,可以应用于建筑施工、采矿、水下作业、危险品处理、消防救援等众多领域,其作业效率和安全性都得到了显著提高。例如,建筑施工中的爬墙机器人可以在高空无人机难以操控的情况下,完成对高层建筑的外部清洗、喷漆等工作;水下机器人可以深入水下进行科考和资源调查。随着人工智能和机器人技术的不断发展,特种作业机器人将会在更多领域得到应用,并在解决某些人类无法完成或危险的作业任务方面发挥越来越重要的作用。江苏大型特种作业机器人制作
浙江凯富博科科技有限公司成立于2019-06-12,同时启动了以凯富博科,CathayBot为主的液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人产业布局。是具有一定实力的机械及行业设备企业之一,主要提供液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等领域内的产品或服务。我们强化内部资源整合与业务协同,致力于液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等实现一体化,建立了成熟的液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人运营及风险管理体系,累积了丰富的机械及行业设备行业管理经验,拥有一大批专业人才。浙江凯富博科科技有限公司业务范围涉及从事机器人、飞行器、机械设备、机电一体化、计算机、物联网、通信、智能化科技领域内的技术开发、技术咨询、技术服务、技术转让;工业机器人、机械手的制造、加工(除废塑料、危险品及有污染的工艺)、销售;液压的设备及配件、消防设备、仪表仪器、电气设备、自动化设备及配件、通用机械设备及配件、金属材料、五金制品的销售;货物及技术进出口(国家禁止或涉及行政审批的货物和技术进出口除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动)等多个环节,在国内机械及行业设备行业拥有综合优势。在液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等领域完成了众多可靠项目。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
浙江凯富博科科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.